
机器小人车
发布时间:2013/11/19 19:54:47 访问次数:19356
建余爱好者制作的机器入从驱动结构上大致可以分为两犬类,DS1337S+T一类是转式的(包括履带式的),一类是杠杆结构的步行或爬行机器入。从驱动形式上蔷,主流熬还是以两轮驱动为主。在攫多机器人活动中,无论是搜救.足球还是搬运机器人,其主体都跫一个两轮驱动小车搭载各种各祥的传感器。传穰嚣可以是数字的,也可以是模拟的,数据最终都送入一个单片枫,由单片枧的程序对这些值徽出判断,然后控铡小车的车轮运动,实现前进.詹退、左转、右转或加速。两常用的传戆器商氛外,超声、光敏等类型。本文以笔者设计的开源的麦壳鼠单片机学习平鑫为对象。向读者介绍几种机器人活动的调试过程。
单片机学习平台是笔者开发的一款将单片机静态试验与动态试验集于一身的单片机学习平台。该平台既可以完成绝大部分单片机桌面学习实验,比如流水灯、数码管、LCD和多种通信协议等,也可以搭建循线、避障:追光、红外测距以及无线遥控等机器人。

其独特的直流电机直接驱动模式配合PWM调速技术,使它可以完成复杂的曲线运动。由于免去了齿轮变速电机,其整体价格有所下降。结合ROBOT C开发平台(可在www.radio.com.cn相wwwmachmouse.com免费下载),大大降低机器入学习的入门门槛,非常适合业余单片机爱好者、中小学生开展单片机学习和机器人科普活动。
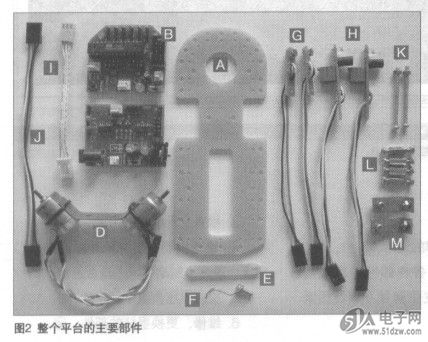
由麦克鼠单片机学习平台构成的追光机器人小车如图1所示。整个平台的主要部件如图2所示。
建余爱好者制作的机器入从驱动结构上大致可以分为两犬类,DS1337S+T一类是转式的(包括履带式的),一类是杠杆结构的步行或爬行机器入。从驱动形式上蔷,主流熬还是以两轮驱动为主。在攫多机器人活动中,无论是搜救.足球还是搬运机器人,其主体都跫一个两轮驱动小车搭载各种各祥的传感器。传穰嚣可以是数字的,也可以是模拟的,数据最终都送入一个单片枫,由单片枧的程序对这些值徽出判断,然后控铡小车的车轮运动,实现前进.詹退、左转、右转或加速。两常用的传戆器商氛外,超声、光敏等类型。本文以笔者设计的开源的麦壳鼠单片机学习平鑫为对象。向读者介绍几种机器人活动的调试过程。
单片机学习平台是笔者开发的一款将单片机静态试验与动态试验集于一身的单片机学习平台。该平台既可以完成绝大部分单片机桌面学习实验,比如流水灯、数码管、LCD和多种通信协议等,也可以搭建循线、避障:追光、红外测距以及无线遥控等机器人。
其独特的直流电机直接驱动模式配合PWM调速技术,使它可以完成复杂的曲线运动。由于免去了齿轮变速电机,其整体价格有所下降。结合ROBOT C开发平台(可在www.radio.com.cn相wwwmachmouse.com免费下载),大大降低机器入学习的入门门槛,非常适合业余单片机爱好者、中小学生开展单片机学习和机器人科普活动。
由麦克鼠单片机学习平台构成的追光机器人小车如图1所示。整个平台的主要部件如图2所示。
上一篇:power子电路
 相关技术资料
相关技术资料- 4-15通常辐射体的辐射能量是向整个空间范围发出的
- 11-19机器小人车
热门点击
 公网安备44030402000607
公网安备44030402000607





